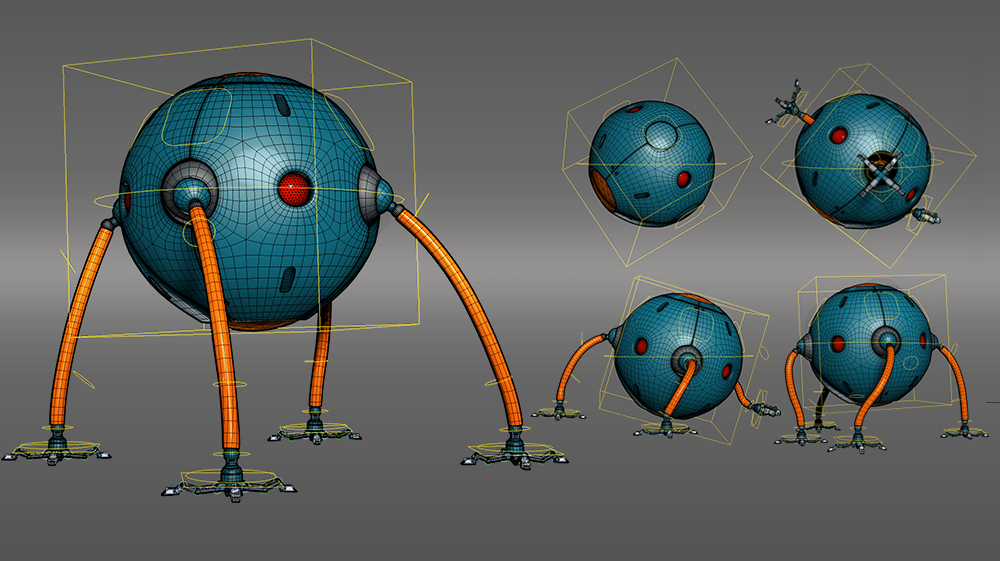
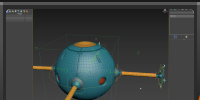
本套课程将教授大家如何绑定一个有趣的滚动机器人角色,四条如同章鱼触角一般可伸缩的柔软机械臂是它最大的亮点之一。这套控制系统不仅可用于影视动画,还能够导入到虚幻引擎等游戏引擎中使用。课程一步步的还原制作过程中的每一个技术细节,让大家清晰的掌握包括柔软肢体绑定技巧在内的丰富技能,并且让骨骼控制系统能同时满足游戏引擎的规范要求。这套课程还将免费附送64集的机器人动画制作课程,教授大家如何使用这套控制系统制作出生动有趣的动画效果。
喜欢机器人绑定的朋友们
课程讲师
讲师简介:
自幼学习绘画,美术功底扎实;2002年进入动画行业,曾在幻维数码,金山,微启,网游数码等游戏公司和动画公司担任动画师、动画主管和动画指导等职;2005年成立个人工作室,与国内外多家广告公司、工作室及主流媒体建立了长期良好的合作关系,其中包括中视广告、TVS5、嘉佳卡通、Blur工作室、迪士尼卡通和可口可乐等等,参与众多电视动画广告,游戏片头和动画短片开发的制作项目。
课程大纲(包含的课时)(预览后,先停播,再关闭预览窗)

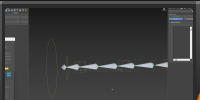
1创建腿部软体部分的骨骼链
00:06:50

2为腿部骨骼创建路径约束
00:07:53
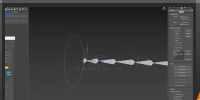
3为腿部骨骼创建父级虚拟体
00:03:48
4创建控制骨骼路径形状的控制器01
00:05:13

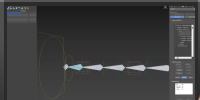
5创建控制骨骼路径形状的控制器02
00:03:15

6实现柔体变形时骨骼链头尾相接的连贯性01
00:08:40
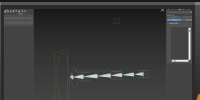
7实现柔体变形时骨骼链头尾相接的连贯性02
00:03:54
8实现腿部柔体骨骼纵向自旋转控制01
00:08:51
9实现腿部柔体骨骼纵向自旋转控制02
00:03:44
10柔体腿部控制思路总结讲解
00:09:43
11创建腿部根部球形关节的虚拟体骨骼
00:07:33

12创建并设置机械脚掌的控制骨骼
00:07:15

13创建机械爪的控制系统01
00:15:46

14创建机械爪的控制系统02
00:13:16
15完成机械臂的绑定
00:12:51
16完成机械臂舱门盖的虚拟体骨骼设置
00:06:35

17完整的蒙皮骨骼父子关系的建立
00:03:54
18创建舱门的控制器
00:04:07
19创建用于实现移动和滚动的控制器
00:04:16
20设置对虚拟骨骼和舱门控制器的控制关系
00:03:14
21完成对舱门虚拟体骨骼的控制设置
00:08:50
22将腿部的point骨骼子级链接到身体中心的point骨骼
00:04:29
23蒙皮前的准备工作01
00:07:36
24蒙皮前的准备工作02
00:11:46
25蒙皮前的准备工作02
00:10:01

26主体及金属部件蒙皮02
00:08:02
27主体及金属部件蒙皮03
00:05:11
28柔体机械臂的蒙皮方法01
00:19:22

29柔体机械臂的蒙皮方法02
00:10:12
30柔体机械臂的蒙皮方法03
00:01:08
相关课程推荐:


04:30:52

01:46:40